Operational: April 2019 – March 2023 (retired)
GoldPaw … named due to the gold bling motors. I wanted to build a new drone to improve upon some aesthetic and functional design issues of my Cragon drone build.
This drone flew very successfully for a number of years. I retired it as the retrofit to digital VTX wasn’t economically worthwhile. The drone motors were showing signs of overuse, twitching mid-flight, and irrespective, I doubted a new ESC install would match the available motor wiring lengths.

Posts
Posts related to Goldpaw.
Components
Components used in the build are as follows:-
| PART | Component |
|---|---|
| Frame | Armattan Marmotte |
| Flight Controller | Matek F722-MiniSE ( |
| ESCs | Holybro Tekko32 35A 4-in-1 ESC |
| Motors | Flywoo NIN N2207 2450KV Titanium Brushless Motor Gold |
| FPV VTX | Atlatl HV V2 ( |
| FPV Camera | Foxeer Monster Mini Cam |
| Receiver | TBS Tracer ( |
| Extras | GPS, Buzzer |
I’d seen some designs on Rotor Builds that look elegant and I wanted a crack at streamlining the wiring and to focus on improving some issues on my previous Cragon build, by:
- Using a 4-in-1 ESC to take the ESCs off the arms, to avoid dirt, dust and death
- Considering the location of battery connector to avoid snapping off or entanglement
- Improving view of sky through higher tilt angle for the FPV + GoPro cameras (the Marmotte frame allows for adjustment)
- Repositioning of GPS to avoid removing it every battery change
The wiring diagram for the Matek F722-SE to the components is as follows:
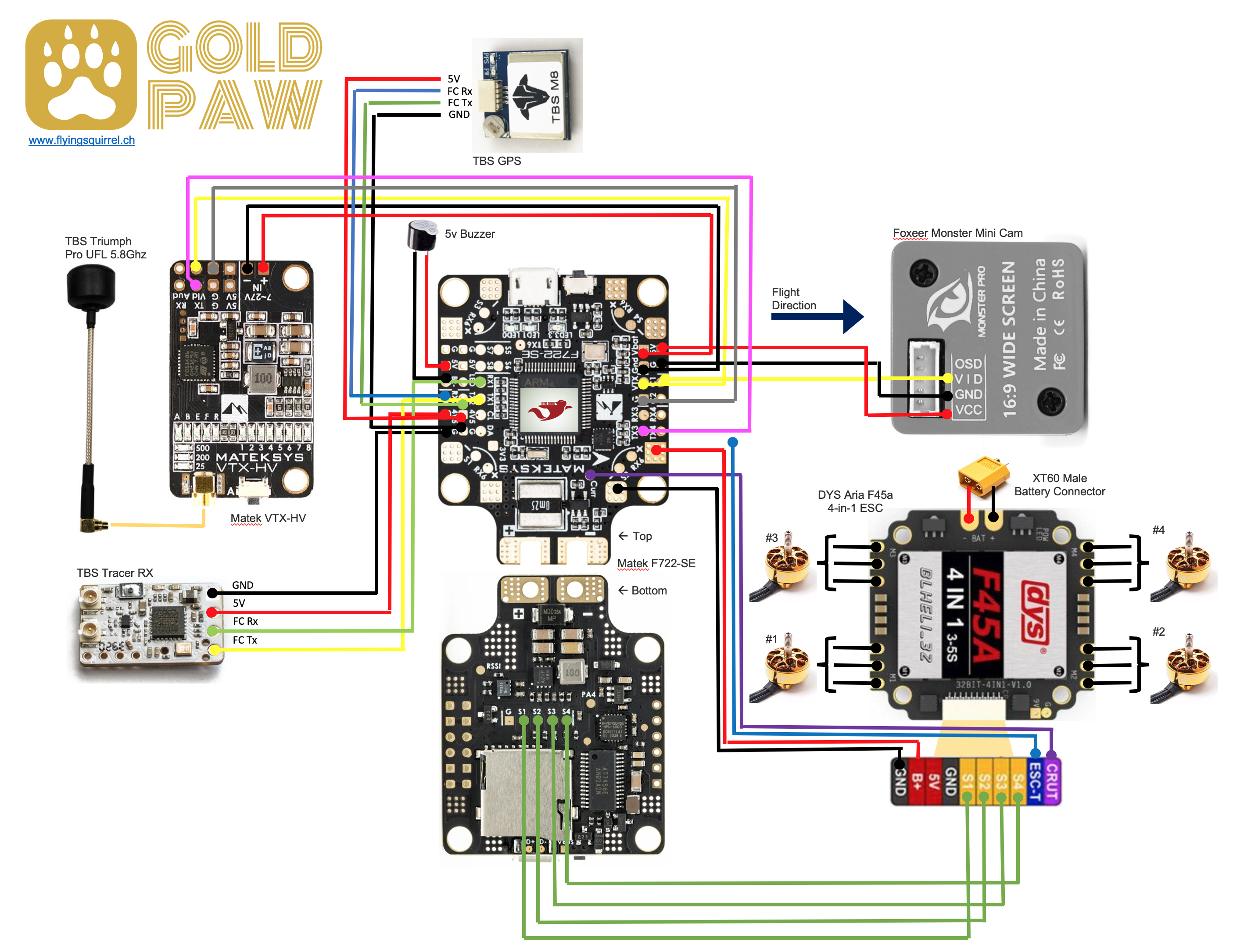
It flies in a much smoother manner to the Cragon build – I think due to the Flywoo motors and ESC pairing – and it looks pretty good also.
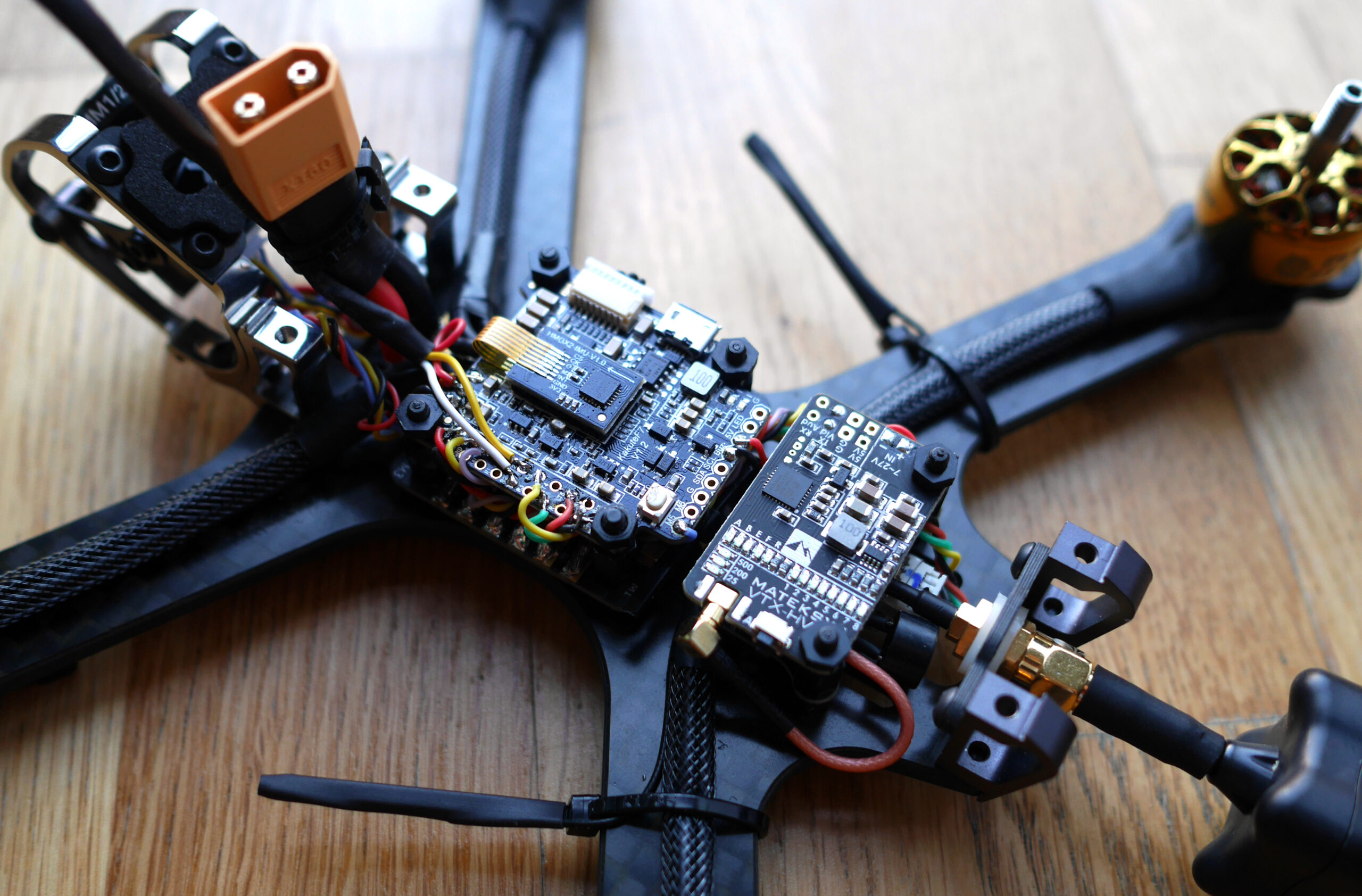
Update July 2022: I revised GoldPaw, adjusting the location of the 4-in-1 ESC to the rear of the drone, allowing a full-size Atlatl HV V2 VTX to set atop the ESC, and to balance out the weight of a GoPro 10 at the front. I exchanged the full-form F722 FC to a miniSE version in order to cut weight and fit everything into the frame. The build style is similar to the Megabat drone that I have recently constructed, using some of the 3D-printed parts for the battery & antenna connector, along with a tray for the RX.
Build Photographs

Flight Photographs







