I had to replace my Tekko 35A 4 in 1 ESC after an in-motion “high energy” crash into a field. I’ve used DYS Aria separate ESCs before, so here was the time to use a DYS Aria 4 in 1.

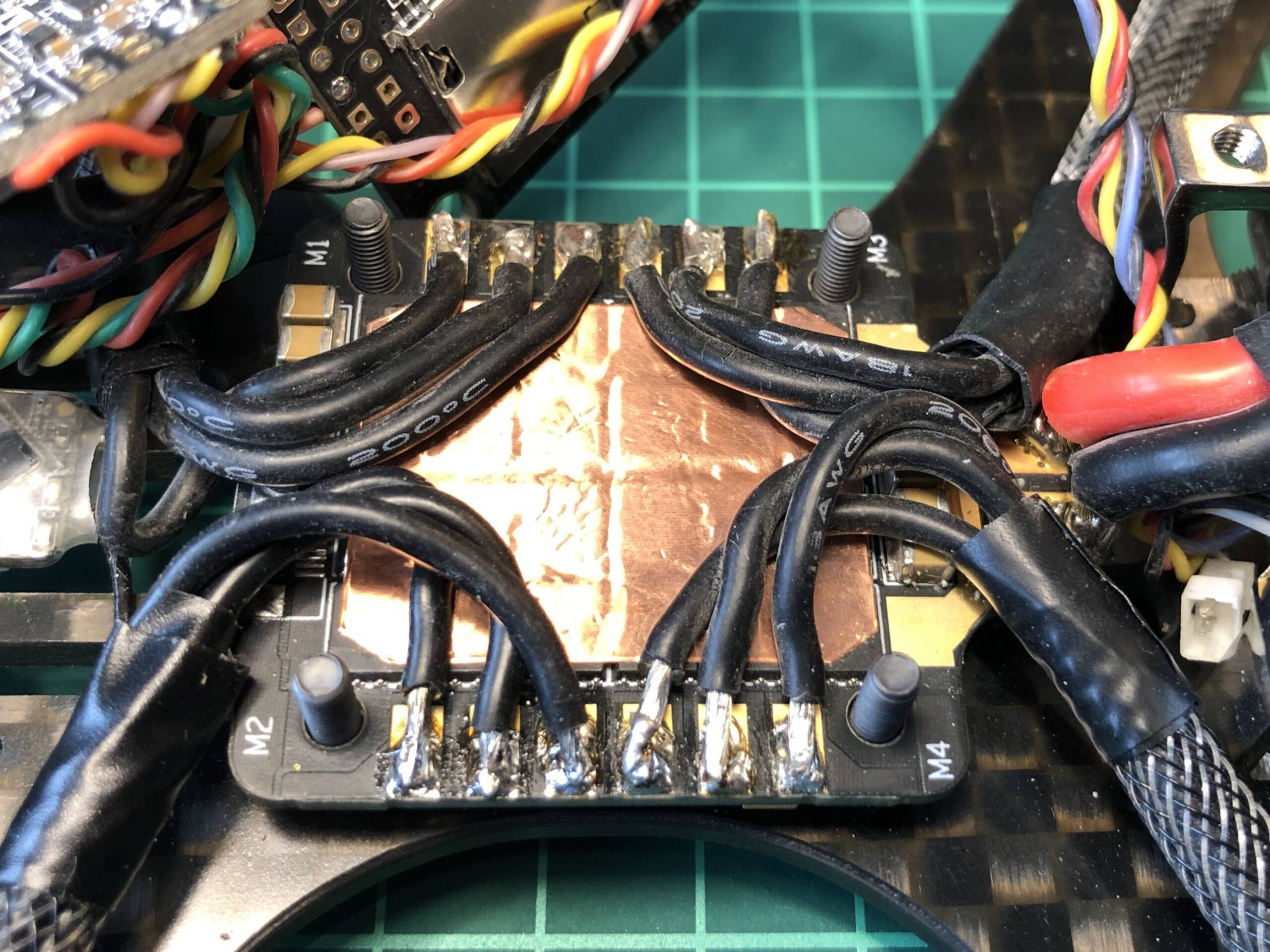
Below one can see the ESC motor wiring – nice and neat. The white pin-out socket connector on the right-hand-side provides the wiring to the flight controller. My observations on installation:
- It remains to be seen if the socket connector wiring survives crashes, owing to being so exposed at the edge of the drone
- The mounting holes are M4 instead of the usual M3 – without an adapter. I suppose they assume you to use anti-vibration grommets. I ended up tightening the stand-offs nice and tight and it seems to hold it
- The pre-soldered battery cable. Great to have a XT60 provided, but the cable is probably the wrong length or soldered at an unwanted angle.

Comparing the wiring to the Tekko 35A, the Dys Aria wins outright. Here is the old Tekko 35A wiring:
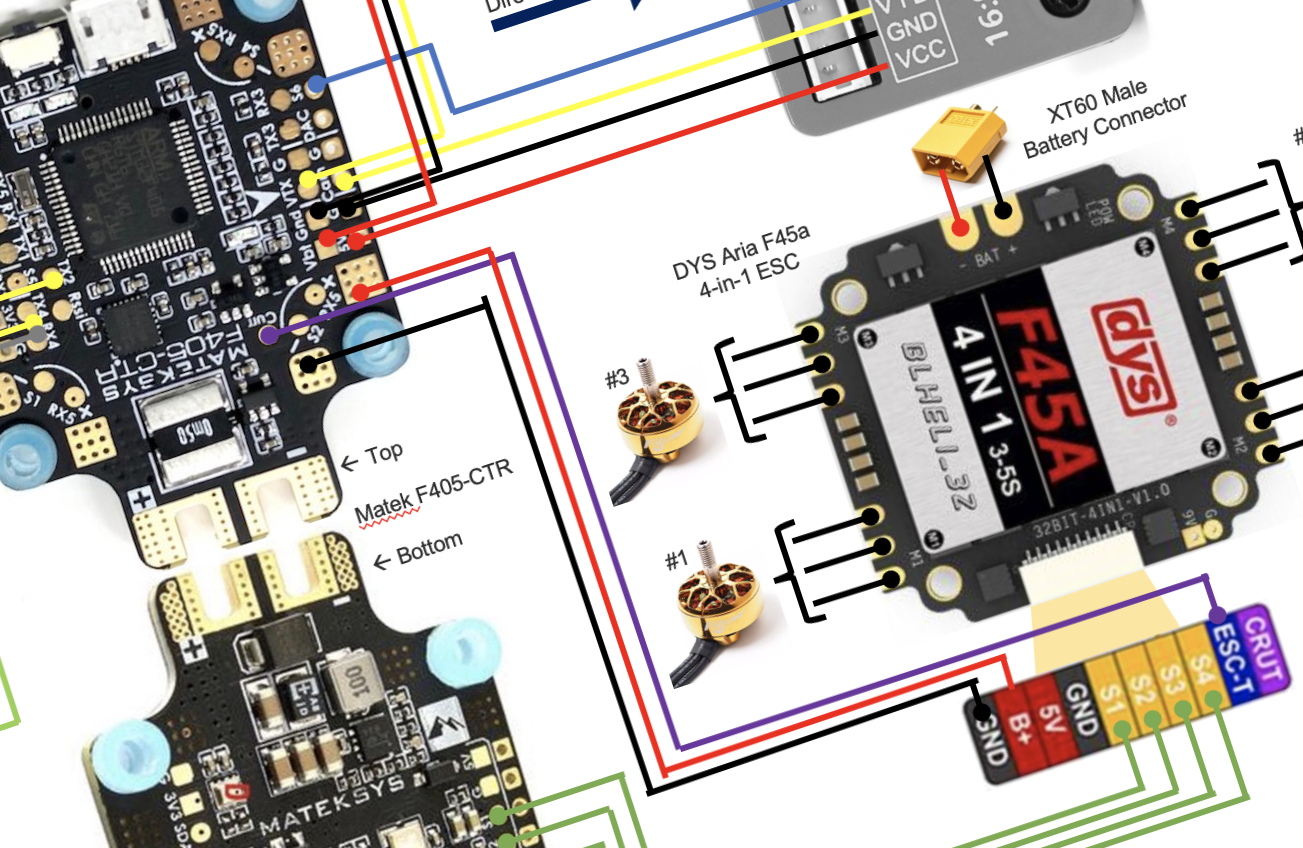
On to the flight controller wiring. Strangely, the wiring diagram isn’t provided with the ESC – the instructions tell you not to kill yourself flying it (thanks), but no pin-out information. Google to the rescue:

The pins are pretty self-explanatory, aside from the following pins:
- CRUT – current sensor. This needs to be connected to the CUR pin on the Matek in order to see the reading of overall current absorbed by the drone
- ESC-T – telemetry data. This can be connected to a spare UART (the RX pin of the UART on the FC) in order to receive telemetry data. Configure Betaflight in a similar manner to Oscar Liang’s telemetry tutorial.
This can then be adapted to the following wiring setup for a Matek F405:
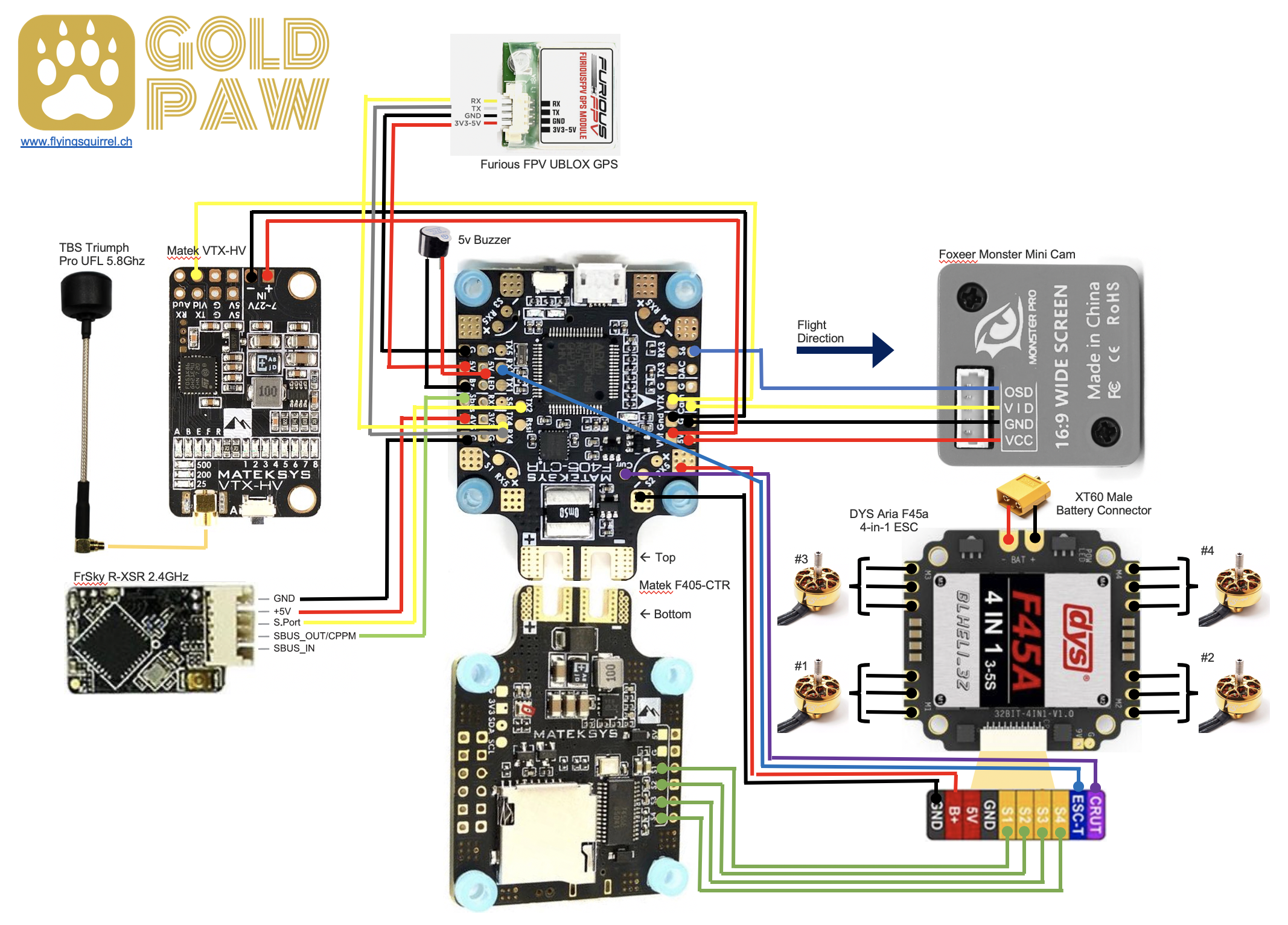
Hope this helps somebody with the pin setup!
Useful links:
- Matek’s F405 wiring diagram – http://www.mateksys.com/?portfolio=f405-ctr
- Oscar Liang’s telemetry tutorial – https://oscarliang.com/esc-telemetry-betaflight/
Edit: Updated 14 May 2020 with updated ESC-T and CRUT wiring
do you have whats the difference with esc-t and crut. currrently have CRUT on the esc going to curr on my matek f405-std
Nice catch – mistake on the wiring diagram; I’ll correct it. The CRUT pin is for reading the current sensor, and the ESC-T pin is for reading the telemetry. The CRUT pin should be connected to the CUR sensor on the Matek, and the ESC-T pin to a UART and configured in Betaflight as the one receiving telemetry data.