
We’ve all had those days … the drone is too powerful for the location you want to fly in! Here’s a way of using one of the X-Lite sliders (potentiometers) to dynamically configure the power output for the drone.
1. Choose controlling switch
On the X-Lite there are two possible potentiometers that one can use – S1 or S2. I’m accustomed to using S2 (the right-hand-side pot) for alert volumes. Thus, I’m going to use S1 (the left-hand-side pot) to control the power of the throttle, varying the power from 50% to 100% through sliding the switch.

2. Create throttle weight and offset inputs
Go to the model “inputs” menu:

Now create two new inputs for throttle weight and offset, naming them TWt (Throttle Weight) and TOf (Throttle Offset). The source for the input should be the pot that you’ve chosen. In my case, S1.
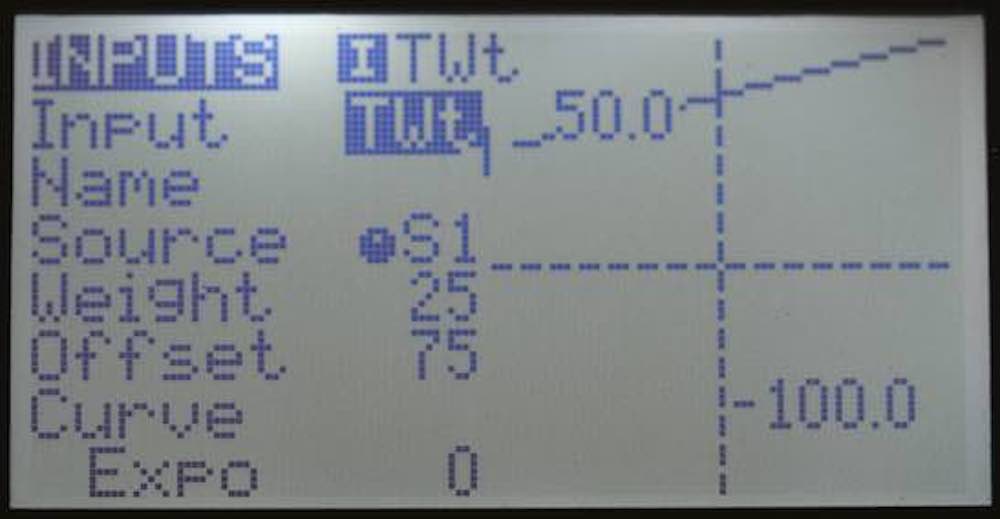
The throttle weight (TWt), changing the name, source, weight and offset:
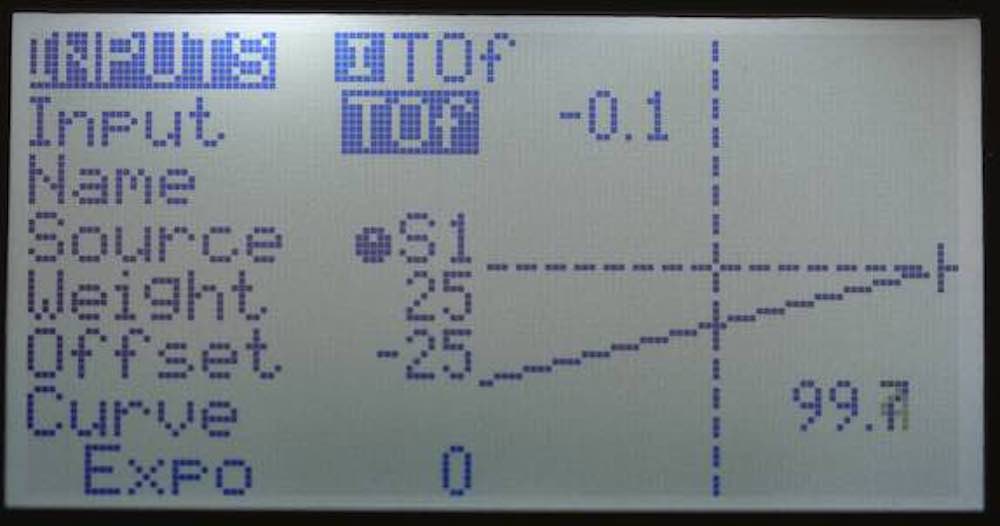
The throttle offset (TOf), changing the name, source, weight and offset:
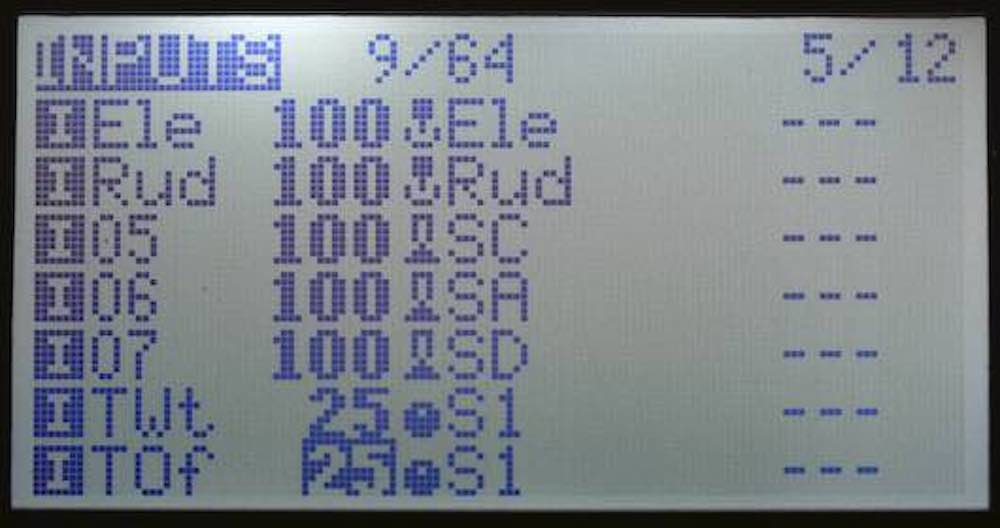
The end result on the input screen:
3. Create the special functions
Go to the model “special functions” menu and create two “ON” functions in the next free available slots. These convert the pot slider value into global variables that can be used as inputs in the throttle input settings (next step).

The first will adjust the throttle weight (TWt) via global variable G1, and the second will adjust the throttle weight (TOf) via global variable G2. Don’t forget to enable them using the checkboxes:

4. Change throttle input channel to react on global variables
Go back to the model “inputs” page and edit the throttle entry:
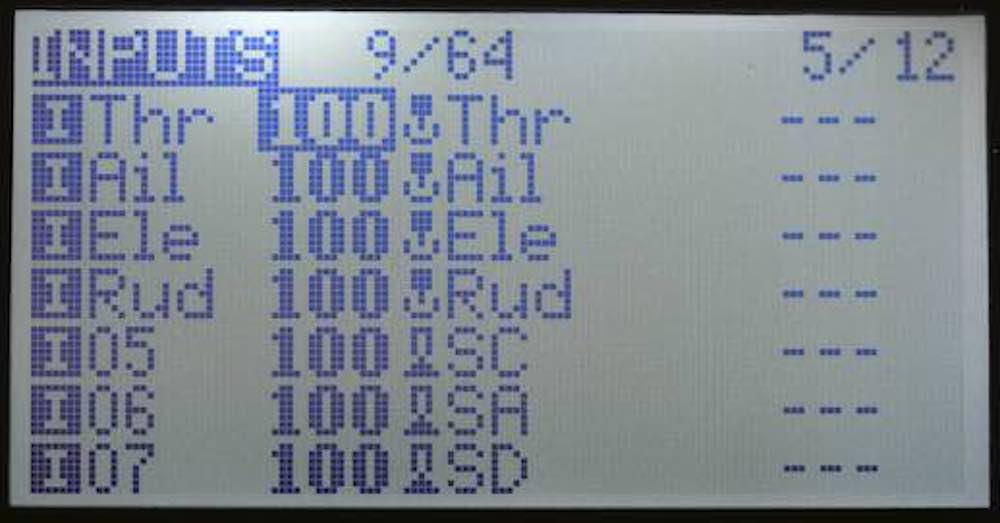
Adjust the weight (from 100) to use global variable G1, and offset (from 0) to use the global variable G2:

After making the changes, you should be able to adjust the S1 pot and see the throttle curve adjust from 50% power to 100% power.
Happy days!
There are other ways of doing this; see Oscar Liang’s extremely helpful post on how to adjust the power on a Taranis controller.
Pingback: Transitioning from a FrSky Horus X12S to a FrSky X-Lite Pro – flyingsquirrel
Thank you sir for this helpful guide!
– A beginner tinywhoop pilot